第3课时:分布式训练技术概览
背景介绍:跨越“显存墙”与“时间墙”
在大模型(LLM)爆发的今天,AI 工程师面临的战场已经彻底改变。如果我们把训练模型比作建造摩天大楼,那么单张 GPU(即便是目前地表最强的 NVIDIA H100 80GB)已经从“全能工兵”变成了仅仅是一块“砖”。
为什么分布式训练从“选修课”变成了“必修课”?我们需要从两个残酷的物理瓶颈说起:
核心痛点 1:装不下(显存墙)
很多初学者误以为:模型参数量 10B(100亿),用 FP16 存储不是才 20GB 吗?80GB 的显卡怎么会不够?
这是一个巨大的误区。在训练过程中,模型参数(Weights)仅仅是显存占用的冰山一角。
让我们算一笔账(以 Adam 优化器 + 混合精度训练为例):
-
模型参数:1 份 FP16 权重 → 2 Bytes
-
梯度 (Gradients):1 份 FP16 梯度 → 2 Bytes
-
优化器状态 (Optimizer States):Adam 需要维护动量(Momentum)和方差(Variance)的 FP32 副本 → 12 Bytes
-
中间激活值 (Activations):前向传播产生的中间结果,主要取决于 Context Length(上下文长度)和 Batch Size → 动态且巨大
结论:每训练 1 个参数,至少需要 16~20 Bytes 的静态显存。
实例:训练一个 175B (GPT-3 级) 的模型,光是静态显存就需要 3.5 TB。
而一张 H100 只有 80 GB。
这意味着,为了把模型“塞进”显存,我们至少需要 44 张 H100 完美拼接在一起,这还没算计算时的临时开销。
核心痛点 2:等不起(时间墙)
假设你有无限显存的魔法 GPU,但算力不变。
-
训练 Llama-3-70B 这样级别的模型,通常需要消耗约 \(10^{24}\) FLOPs 的计算量。
-
一张 H100 在实际训练中的有效算力大约是 300~400 TFLOPS。
-
计算结果:用单卡跑完这趟训练,大约需要 100 年。
没有人能等一个世纪来看 Loss 曲线。为了将训练时间压缩到 几周甚至几天,我们需要成千上万张 GPU 并行计算。
本节课目标
当 GPU 数量从 1 增加到 10000 时,系统的复杂度是指数级上升的。
-
如何让 1000 张卡计算同一个模型,而不互相打架?
-
如何避免 GPU 算 1 毫秒,却要等网络传输 10 毫秒(通信瓶颈)?
-
当显存不够时,是切分数据、切分层、还是切分张量?
本节课我们将深入黑盒内部,解析多张 GPU 是如何像一个精密配合的集团军一样协作的,带你读懂 DDP、FSDP、DeepSpeed 这些技术名词背后的战术逻辑。
1. 通信原语与硬件基础:分布式训练的“语言”与“道路”
分布式训练的核心挑战在于:多张 GPU 之间如何高效、准确地同步信息(如梯度、参数、优化器状态)。这种同步机制构建在高性能计算(HPC)领域的标准通信动作(Communication Primitives)之上,并依赖于底层的物理连接带宽。
在深度学习领域,我们通常使用 NVIDIA NCCL (NVIDIA Collective Communications Library) 作为底层的通信后端,它针对 PCIe、NVLink 和 InfiniBand 进行了深度优化。
1.1 三大核心通信原语 (Communication Primitives)
当我们在 PyTorch 中调用 dist.all_reduce 时,底层并非简单的“发送-接收”,而是执行了一系列高度优化的集合通信算法(如 Ring-based 或 Tree-based 算法)。
1. AllReduce(全归约):同步的总和
-
定义与原理:
-
语义:系统中的每个 GPU 都持有一个张量 \(T_i\),操作结束后,所有 GPU 都会得到相同的张量 \(T_{sum} = \text{Op}(T_0, T_1, ..., T_n)\),其中 \(\text{Op}\) 通常是 Sum(求和)、Mean(求平均)或 Max(求最大值)。
-
实现机制:在 Ring-AllReduce 算法中,该操作实际上由两个步骤组成:ReduceScatter(归约并分发) +AllGather(全收集)。首先将数据分块并归约,使每张卡拥有一部分最终结果,然后再将这些结果广播给所有卡。
-
-
关键应用场景:
- DDP (Distributed Data Parallel) 的核心生命线。在反向传播结束后,每张卡计算出的梯度是基于局部数据(Local Batch)的。必须通过 AllReduce 对所有卡的梯度求平均,确保所有卡使用相同的梯度进行参数更新,从而保证模型副本的一致性。
-
形象比喻:大家各自清点手中的现金(计算局部梯度),然后通过一个快速的传递网络,最后每个人手中的账本都记录了所有人的现金总额(全局梯度)。
2. AllGather(全收集):碎片的拼接
-
定义与原理:
-
语义:每个 GPU 持有一部分数据 \(D_i\)(通常是张量的不同切片),操作结束后,所有 GPU 都会收到所有其他 GPU 的数据,并将它们拼接成一个完整的张量 \(D_{full} = [D_0, D_1, ..., D_n]\)。
-
数据流向:\(1 \to N\) 的广播的集合版。相当于每张卡都做了一次 Broadcast,最终每张卡都拥有了全局完整数据。
-
-
关键应用场景:
- FSDP (Fully Sharded Data Parallel) 的前向传播。在 FSDP 中,大模型的权重被切分存储在不同 GPU 上(以节省显存)。当计算流转到第 \(k\) 层时,所有 GPU 需要通过 AllGather 从邻居那里“借”来该层的剩余参数,临时拼凑出完整的第 \(k\) 层参数进行计算,算完即弃(释放显存)。
3. ReduceScatter(归约并分发):求和后切分
-
定义与原理:
-
语义:它是 AllGather 的逆操作,也是 AllReduce 的一部分。所有 GPU 都有一个完整的张量(或者张量列表),系统对这些张量进行规约(如求和),但结果不完整分发,而是将结果切分成 \(N\) 块,第 \(i\) 张 GPU 只拿走第 \(i\) 块结果。
-
优势:相比于 AllReduce,它减少了后续的广播步骤,显著降低了通信量。
-
-
关键应用场景:
- FSDP 的反向传播。当每张卡计算完梯度后,不需要获得完整的全局梯度(那样会爆显存)。每张卡只需要获得它自己负责更新的那一部分参数对应的梯度总和。因此,梯度在聚合的同时就被切分了。
1.2 硬件拓扑:NVLink 与 InfiniBand
通信原语是软件层面的“语言”,而物理连线则是数据传输的“道路”。道路的宽窄(带宽)和拥堵程度(延迟)直接决定了训练的木桶效应。
1. NVLink 与 NVSwitch (机内高速互联)
-
技术定位:解决单台服务器内部(Intra-node)GPU 之间的通信瓶颈。
-
技术指标:
-
NVLink:一种高带宽、低延迟的点对点互连技术。第四代 NVLink(H100)的双向带宽高达 900 GB/s,是 PCIe Gen5 的 7 倍以上。
-
NVSwitch:如果说 NVLink 是光纤,NVSwitch 就是全光交换机。它允许服务器内的 8 张 GPU 以“全互联(All-to-All)”的方式通信,任意两张 GPU 之间都可以直接传输数据,无需 CPU 参与。
-
-
对训练的影响:
- 决定模型并行 (TP) 的上限:在张量并行(Tensor Parallelism)中,每一层的矩阵乘法都需要在 GPU 间同步中间结果。这种通信频率极高,必须依赖 NVLink 的超高带宽,否则 GPU 会因等待数据而严重空转。
2. InfiniBand (IB) / RoCE (机间互联)
-
技术定位:解决多台服务器之间(Inter-node)的通信问题,构建万卡集群的基石。
-
核心技术:RDMA (Remote Direct Memory Access):
-
传统的 TCP/IP 网络通信需要 CPU 参与数据拷贝(内存 \(\leftrightarrow\) CPU \(\leftrightarrow\) 网卡),延迟极高。
-
RDMA 允许 GPU 的显存数据直接通过网卡传输到远程服务器的 GPU 显存中,完全绕过 CPU 和操作系统内核,实现微秒级的超低延迟。
-
-
主要协议:
-
InfiniBand (IB):专为高性能计算设计的原生网络协议,具有极高的吞吐量(如 NDR 400Gbps)和极低的延迟,但成本较高。
-
RoCE (RDMA over Converged Ethernet):在以太网上实现 RDMA,成本较低,是目前高性价比集群的主流选择。
-
-
对训练的影响:
- 决定数据并行 (DP/FSDP) 与流水线并行 (PP) 的扩展性。当集群扩展到千卡规模时,梯度同步的开销主要由机间网络决定。如果网络拓扑设计不佳(如收敛比过高),通信将成为绝对瓶颈。
1.3 进阶原理:通信与计算的重叠 (Communication-Computation Overlap)
在理想的分布式训练中,我们希望通信是“隐形”的。
-
原理:GPU 具有独立的计算单元(CUDA Cores/Tensor Cores)和数据传输引擎(Copy Engines)。
-
流水线优化:在反向传播过程中,PyTorch DDP 会将梯度分桶(Bucketing)。当第 \(N\) 层的梯度计算完成时,立即触发异步的 AllReduce 传输,与此同时,计算单元继续计算第 \(N-1\) 层的梯度。
-
目标:只要计算梯度的时间 > 传输梯度的时间,通信延迟就被完全“掩盖”了,实现了 1+1 < 2 的时间开销。这也是为什么在慢速网络下,增加模型计算密度(如增加 Batch Size)反而能提升并行效率的原因。
2. 并行策略详解:如何拆解庞然大物
为了将参数量高达数千亿的大模型装入有限的显存并高效训练,我们需要在不同维度上对模型和数据进行拆解,这俗称“切蛋糕”。根据拆解维度的不同,业界演化出了三种主流的并行范式。
2.1 数据并行:从冗余到极致切分 (DDP vs FSDP)
这是最基础也最常用的并行方式,其核心思想是增加计算节点以提升吞吐量(通过增大 Global Batch Size)。
DDP (Distributed Data Parallel)
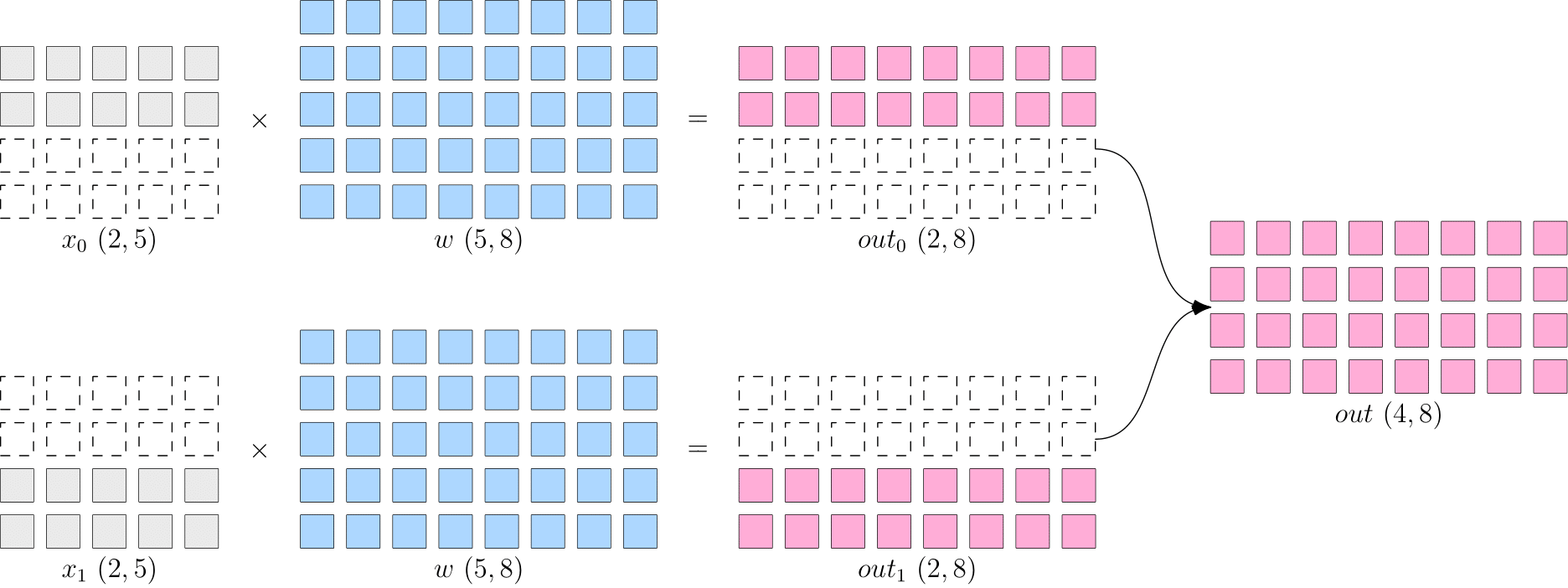
将数据 \(x\) 进行切分,而每个设备上的模型 \(w\) 是完整的、一致的。如下图所示,\(x\) 被按照第0维度平均切分到2个设备上,两个设备上都有完整的 \(w\)。
这样,在两台设备上,分别得到的输出,都只是逻辑上输出的一半(形状为 \(2 \times 8\)),将两个设备上的输出拼接到一起,才能得到逻辑上完整的输出。
-
核心原理:“模型复制,数据切分”。
-
在训练开始前,将完整的模型参数广播(Broadcast)到每一张 GPU 上。
-
在训练过程中,每张卡读取不同的数据分片(Micro-Batch)进行前向和反向传播。
-
梯度同步:反向传播结束后,各卡通过
AllReduce原语对梯度进行累加求和,确保所有卡使用完全相同的梯度更新参数。 -
通信优化:为了掩盖通信延迟,DDP 采用了分桶(Bucketing)机制。即不必等所有梯度都算完再通信,而是算完一层(或积攒一定量)就立即发送,实现计算与通信的流水线重叠。
-
-
瓶颈:显存冗余。对于 \(N\) 张卡,模型参数、优化器状态和梯度被存储了 \(N\) 份。这导致单卡显存成为模型规模的硬上限。
-
适用场景:中小规模模型(如 ResNet, BERT, Llama-7B),或显存极其充裕的场景。
FSDP (Fully Sharded Data Parallel)
-
核心原理:“切分一切,按需重组”。基于微软 ZeRO (Zero Redundancy Optimizer) 算法的思想。
- 它打破了 DDP 的冗余,将模型参数 (Parameters)、梯度 (Gradients) 和 优化器状态 (Optimizer States) 全部均匀切分(Shard)并散布到所有 GPU 上。单卡不再持有完整模型。
-
运行逻辑(通信换显存):
-
前向传播 (Forward):当计算流转到第 \(k\) 层时,当前 GPU 发现自己只有 \(1/N\) 的参数。它立即触发
AllGather通信,从其他 \(N-1\) 张卡拉取剩余参数,在本地重组出完整的第 \(k\) 层。计算完成后,立即释放非本地参数,腾出显存。 -
反向传播 (Backward):同理,先
AllGather完整参数计算梯度。计算完成后,立即执行ReduceScatter,将梯度归约并分发回各自负责的 GPU,随后删除完整的梯度副本。
-
-
适用场景:超大模型训练。它是目前微调 Llama-3-70B/405B 等巨型模型的标准方案,能将显存利用率推向极致。
2.2 模型并行:突破单卡算力与显存限制 (TP 与 PP)
当单层网络的参数量过大(超出单卡显存),或者网络过深时,单纯的数据并行已无法运行,必须对模型本身进行切割。
2.2.1 TP (Tensor Parallelism / 张量并行)
-
切分逻辑:层内切分(Intra-layer)。利用矩阵运算的结合律,将一个巨大的矩阵乘法拆分到多张卡上并行计算。
-
实现细节(以 Transformer 为例):
-
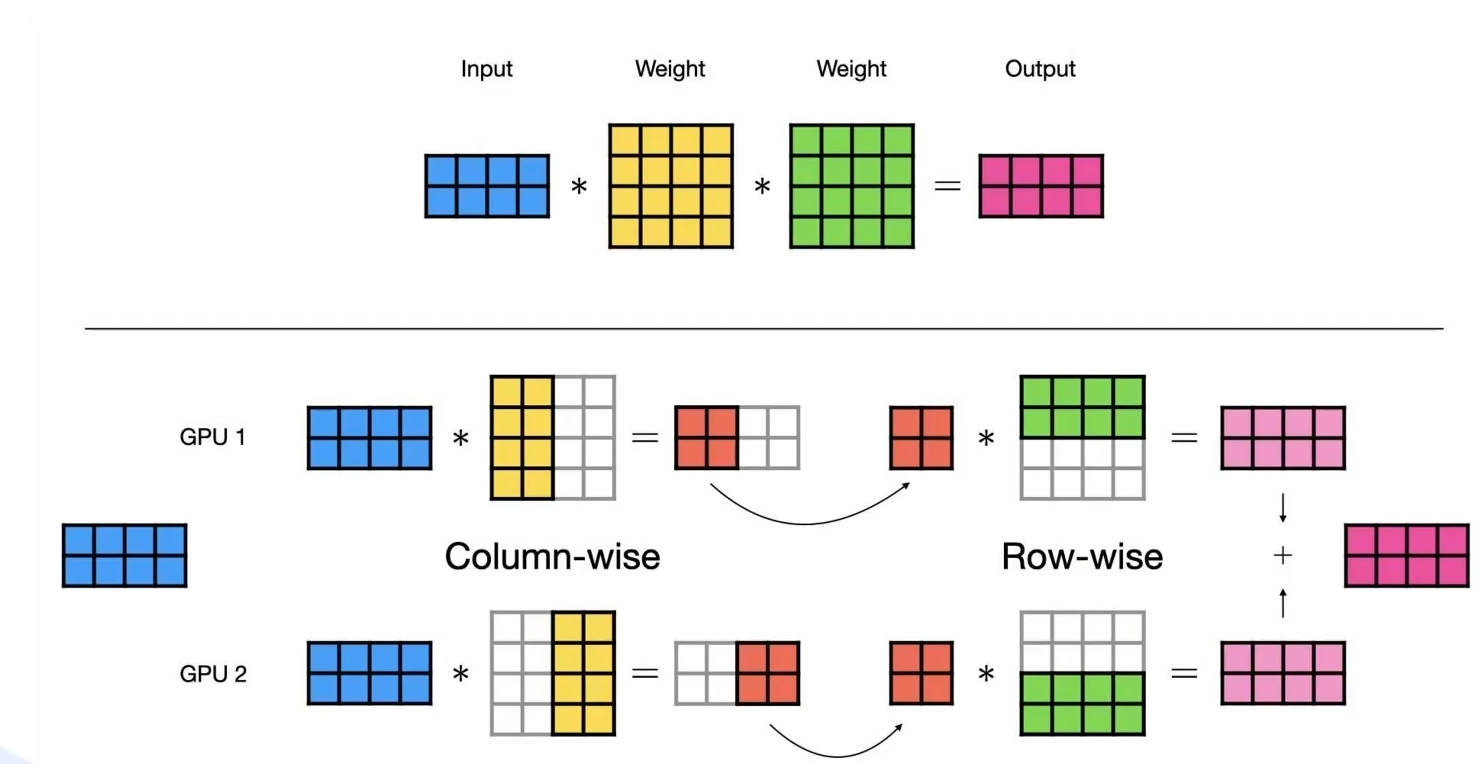
列并行 (Column Parallel):将权重矩阵 \(W\) 按列切分。输入 \(X\) 广播给所有卡,每张卡计算 \(X \times W_i\),得到部分输出。
-
行并行 (Row Parallel):将权重矩阵 \(W\) 按行切分。输入 \(X\) 也需要按列切分,每张卡计算 \(X_i \times W_i\),最后通过
AllReduce累加结果。 -
Megatron-LM 架构:通常在 MLP 层和 Attention 层采用“先列并行,后行并行”的组合,这样可以消除两次矩阵乘法中间的通信同步,只需在两头进行通信。
-
-
特点:高频通信。TP 在每一层的计算过程中都会发生通信。因此,它对带宽和延迟极其敏感,必须部署在拥有 NVLink 的同一台服务器内部。通常 TP Size \(\le\) 8。
2.2.2 PP (Pipeline Parallelism / 流水线并行)
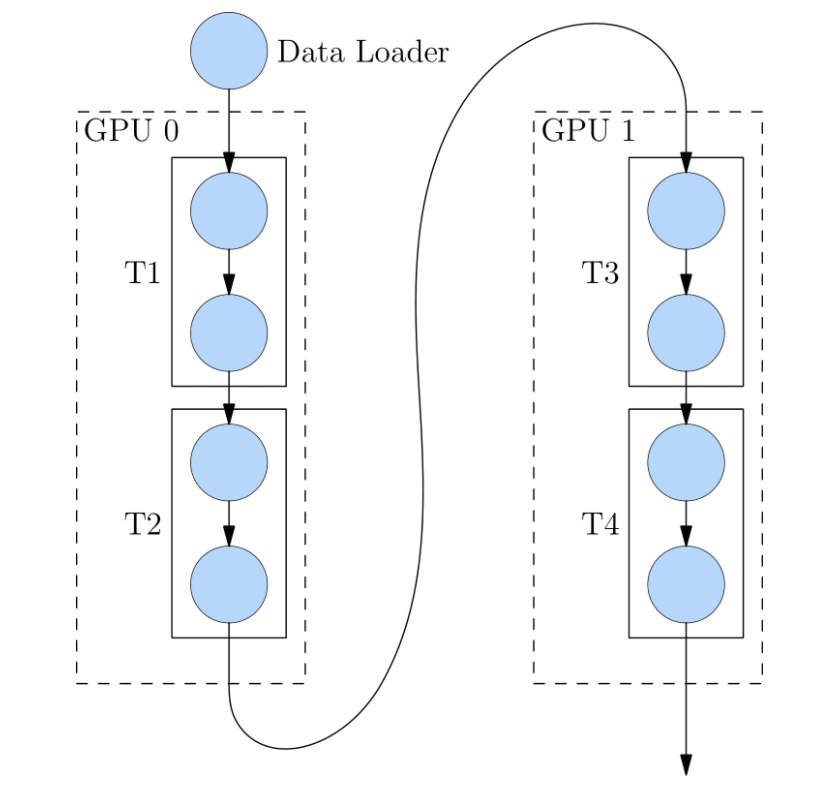
该流程图描绘了深度学习模型在两个 GPU 之间的分布执行逻辑,展示了数据流如何跨设备传递。
-
核心组件
-
Data Loader (数据加载器):位于顶部,负责将原始数据分批次(Batch)输入到计算流水线中。
-
GPU 0 & GPU 1:代表两个独立的计算设备。模型被分割成不同的部分,分别部署在这些设备上。
-
T1, T2, T3, T4 (模型层/模块):
-
T1 & T2:部署在 GPU 0 上。数据首先进入 T1,处理后传递给 T2。
-
T3 & T4:部署在 GPU 1 上。接收来自前一个 GPU 的中间输出并继续计算。
-
-
-
数据流向
-
输入阶段:数据从
Data Loader流入GPU 0的第一个模块T1。 -
设备内传递:在
GPU 0内部,数据从T1线性流向T2。 -
跨设备通信 (Cross-Device Communication):这是图中最显著的特征。一条长曲线箭头表示
T2的输出被发送到了GPU 1的T3输入端。这通常涉及显存到显存(P2P)的数据拷贝。 -
输出阶段:数据在
GPU 1内部经过T3和T4处理后,从底部流出(通常进入 Loss 计算或下一轮迭代)。
-
-
切分逻辑:层间切分 (Inter-layer)。将深层模型按层切成多个阶段 (Stage),每个 Stage 放置在不同的 GPU 上。
- 例如 60 层的模型,GPU1 负责 Layer 1-15,GPU2 负责 Layer 16-30,以此类推。数据像流水线产品一样在 GPU 之间流动。
-
痛点:流水线气泡 (Pipeline Bubble)。
- 由于依赖关系,下游 GPU (Device \(i+1\)) 必须等待上游 GPU (Device \(i\)) 计算完传输激活值后才能开始工作。这导致训练开始和结束阶段存在大量的 GPU 空转时间,称为“气 泡”。
-
优化策略:
-
1F1B (One-Forward-One-Backward):通过交替执行前向和反向传播,减少显存占用。
-
Micro-Batch:将一个大 Batch 切分为多个微批次,尽快填满流水线,减小气泡占比。
-
-
特点:通信量较小(仅传输边界层的 Activation),适合跨机通信(Inter-node)。
2.3 混合并行策略
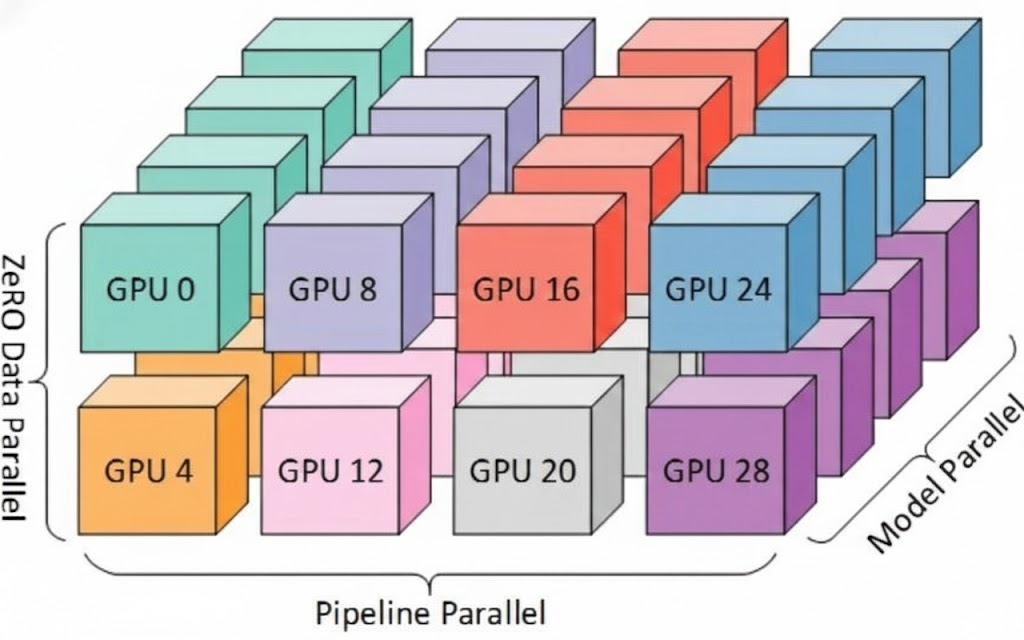
对于 GPT-4 级别的万亿参数模型,单一策略往往顾此失彼。业界通常采用 3D 并行,结合上述策略的优势,构建一个立体的并行立方体。
3D 并行 (DP + TP + PP)
-
拓扑映射逻辑:依据硬件带宽层级进行映射。
-
最内层 (TP):利用单机内部最高的 NVLink 带宽,放置张量并行 (Tensor Parallelism)。
-
中间层 (DP/FSDP):在 TP 组之间,或者跨机的小范围内,利用相对较高的带宽进行数据并行。
-
最外层 (PP):利用机间网络 (InfiniBand/RoCE),将模型流水线跨越多个机柜或节点。
-
-
优势:最大化计算效率,最小化通信瓶颈。
MoE 专家并行 (Expert Parallelism, EP)
-
原理:针对 Mixture of Experts (混合专家) 架构(如 Mixtral 8x7B, DeepSeek-MoE)。
- MoE 模型包含一个门控网络 (Gate) 和多个专家网络 (Experts)。对于每个 Token,Gate 只会激活少数几个专家进行计算(稀疏激活)。
-
并行逻辑:
-
将不同的“专家”网络放置在不同的 GPU 上。
-
All-to-All 通信:当 GPU1 上的 Token 被路由到 GPU2 上的专家时,需要进行点对点的全交换通信。这是一种通过网络交换 Token 数据的并行模式。
-
-
挑战:负载均衡。如果某个话题(如“编程”)太热门,导致所有 Token 都涌向同一个专家,该 GPU 会过载,而其他 GPU 空闲。需要配合辅助 Loss 进行负载平衡。
3. 显存优化技术:压榨每一字节
除了并行,我们还需要算法级的优化来节省显存。
3.1 ZeRO 系列 (Zero Redundancy Optimizer)
微软 DeepSpeed 提出的分片策略,FSDP 就是 ZeRO-3 的 PyTorch 原生实现。
-
ZeRO-1:仅切分 Optimizer States(占显存大头,约占模型权重的 2-3 倍)。收益最高,通信开销最小。
-
ZeRO-2:切分 Optimizer States + Gradients。
-
ZeRO-3:切分 Optimizer States + Gradients + Parameters。显存占用降至最低,但通信开销最大。
3.2 FlashAttention-2/3
-
痛点:Transformer 的 Attention 机制显存占用随序列长度呈平方级增长 \(O(N^2)\)。
-
原理:通过 Tiling(分块计算) 和 IO 感知,在 SRAM(GPU 片上高速缓存)中完成计算,减少对 HBM(显存)的读写次数。
-
效果:不仅省显存,训练速度通常能提升 2-4 倍。
3.3 Gradient Checkpointing (重计算)
-
原理:时间换空间。
-
常规:前向传播时保存所有中间层的激活值(Activation),供反向传播使用。显存占用极大。
-
重计算:前向传播时不保存中间激活值,只保存几个关键节点。反向传播用到时,重新计算一遍前向过程。
-
-
代价:计算量增加约 33%,但显存可节省 50% 以上,是训练长序列(Long Context)的必备技术。
3.4 CPU Offload
-
原理:显存不够,内存来凑。将暂时不用的参数或优化器状态“卸载”到 CPU 内存(RAM)中,计算时再加载回 GPU。
-
代价:PCIe 传输速度远慢于显存,会显著拖慢训练速度,通常作为显存不足时的保底手段。
4. 分布式对数据的影响:不仅仅是分发
分布式环境改变了数据的流动方式,直接影响训练效果。
4.1 Global Batch Size (GBS) 缩放规律
-
公式:\(GBS = \text{Micro Batch Size} \times \text{Gradient Accumulation} \times \text{Data Parallel Size}\)
-
影响:
-
GBS 决定了梯度的稳定性。GBS 越大,梯度越稳,但训练越慢(收敛所需的 Step 变少,但每个 Step 计算量变大)。
-
线性缩放律:当 GBS 增大时,通常需要线性增加学习率(Learning Rate),直到达到临界点。
-
4.2 Micro Batch 与流水线填充
为了解决 Pipeline Parallelism 中的“气泡”问题,我们不一次性塞入一个大 Batch,而是把它切成很多个小 Micro Batch。
- 流水线填充:让 GPU1 处理完 Micro Batch 1 立即传给 GPU2,同时紧接着处理 Micro Batch 2。这样流水线就被“填满”了,减少了空转。
4.3 数据分片 (Sharding) 与断点续训 (Checkpointing)
-
Sharding:在多卡训练时,必须确保 DataLoader 的
Sampler是分布式的。即:GPU 0 读第 1-100 条数据,GPU 1 必须读第 101-200 条数据,不能重复。 -
Checkpointing:
-
Sharded Checkpoint:每张卡只保存自己显存里的那部分参数切片(速度快,但文件是碎的)。
-
Merged Checkpoint:保存时自动合并成一个完整的权重文件(方便推理,但慢)。
-
关键点:恢复训练时,不仅要加载权重,还要加载 RNG state (随机数种子),确保数据读取顺序和 Dropout 行为与中断前一致,否则 Loss 会剧烈震荡。
-
本章总结
分布式训练是一场精密的“多兵种联合作战”。
| 技术组件 | 军事比喻 | 解决的核心问题 | 具体作用描述 |
|---|---|---|---|
| NVLink | 特种部队(TP)的单兵作战能力 | 通信延迟与带宽限制 | 提供高速GPU间通信,支撑张量并行(Tensor Parallelism)的高效协作 |
| FSDP/ZeRO | 后勤补给(显存)的存储难题 | 显存容量不足 | 实现参数分片存储,突破单卡显存限制,支持大规模模型训练 |
| FlashAttention | 战术执行(计算)的速度 | 计算效率与内存访问 | 优化注意力机制计算,显著提升训练速度并减少显存占用 |
| Checkpoint | 存档点,保证意外发生后都能整装待发 | 训练中断恢复 | 定期保存训练状态,支持断点续训,确保训练过程的可靠性和连续性 |
这种多兵种联合作战的架构设计,让分布式训练从"理论可能"变为"工程可行",支撑了当今大模型训练的整个生态。